ダイナミックマップ2.0の高信頼化技術に関するコンソーシアム(DM2.0高信頼化コンソ)
2023年4月から後継のプロジェクトとして「先進モビリティサービスのための情報通信プラットフォームに関するコンソーシアム」を開始しました
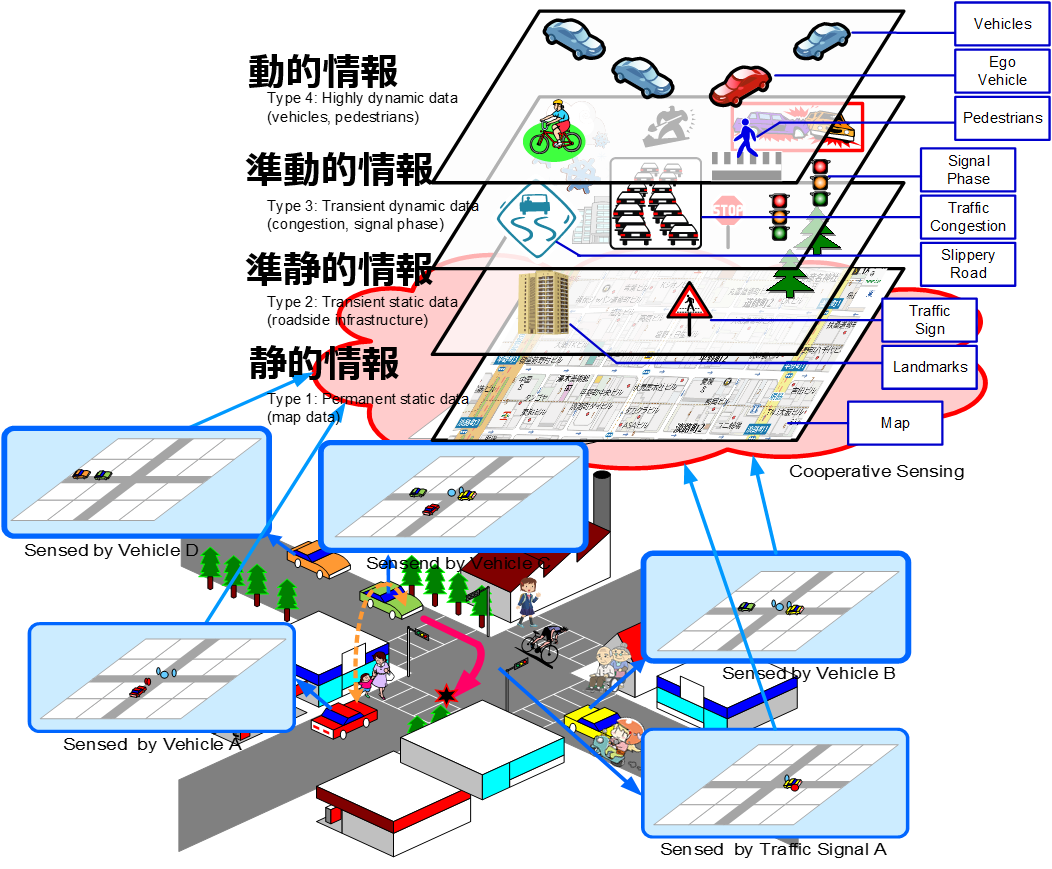
自動車に搭載されたセンサの高度化によって、周囲の走行環境を詳しく認識できるようになり、ドライバへの警告や危機回避を自動で行う安全運転支援システム、自律走行を可能とする自動運転システムなどの研究が加速しています。しかし、車両単体からセンサで認識できる範囲は非常に限定的です。道路上に存在する周囲の車両や道路インフラ装置のセンサが検出した情報を、通信を介して共有し、認識できる範囲を拡張することが重要な課題となっています。
また、車載システムの高度化に伴って地図情報の高度化も必要となっています。従来からの、目的地までの経路探索の用途だけでなく、各自動運転車両の自己位置推定のための高精度な空間特徴量の提供や、車両間で共有されたセンサ情報同士の関連付けのための基盤情報としての役割が、新たに地図へ期待されるようになりました。高精度の道路地図上に、センサなどから得た動的な情報を重畳できるようにした地図データベースは「ダイナミックマップ」と呼ばれ、自動運転等の高度な交通サービスを支える上で必要な情報基盤と位置づけられています。日本国内では内閣府の戦略的イノベーション創造プログラム・自動走行システム(SIP-adus)のプロジェクト内で重点分野の1つとして扱われており、欧州ではNDS協会において高精度道路地図の仕様が検討され、ERTICO - ITS Europeにおいて車両からのデータをクラウドに集約する仕組みが検討されるなどの動きを見せています。これらの既存の活動において、高精度道路地図は早くから協調領域として扱われ、仕様化・共通化が進められてきました。しかし、センサ情報を通信によって共有し、高精度道路地図と統合利用する、ダイナミックマップの機能を現実的にどのようなシステムとして実現するかについては競争領域とされていました。
名古屋大学と同志社大学は、複数の企業・非営利組織で構成されたコンソーシアム型の共同研究組織「ダイナミックマップ2.0コンソーシアム」(DM2.0コンソ)を立ち上げ、ダイナミックマップの交通情報サービスを提供できるシステムの開発を行いました(2016年10月開始、2020年3月終了)。ソフトウェア成果物であるダイナミックマップ2.0プラットフォームは、車載システムやスマートフォン等の組込み環境、道路インフラ・通信基地局などのエッジ環境、データセンターのクラウド環境の、三階層にまたがった通信連携を行う分散データベースシステムとして実現されました。

連絡先
本コンソーシアムの活動内容に関するご質問や、参加についてのご相談などは
下記の宛先までご連絡ください。
DM2.0高信頼化コンソ事務局 E-Mail:admobi-dm2-conso-sec:::nces.i.nagoya-u.ac.jp (::: を @ に変えてください)