近年の交通分野では、車両に搭載されたセンサにより走行環境を認識し、ドライバへの警告や自動で危険を回避する高度な安全運転支援システム、自律走行を可能とする自動走行システムの研究・開発が加速しています。また、交通流の円滑化、環境負荷軽減などを目的として、車両と道路インフラが連携する、協調ITS(Intelligent Transport Systems)の利用も活発化しています。しかし、単体のセンサで認識できる範囲は非常に限定的(レーザレーダの場合、射程は約120m)であり、手前の物体に遮られて奥の物体が検知できない等の問題もあります。複数の車両や道路インフラの間で、道路上の事象を検出したセンサ情報を共有できるようにすることが、交通サービスを発展させていく上でますます重要となっています。
車載システムの進化に伴い、道路地図の高度化も必要となっています。これまでの車載システムでは、道路地図を目的地までの経路を案内するナビゲーションに主に用いてきました。それに加えて今後は、自動走行システムが自車両の位置を推定するための情報として、周辺の地形・建物の凹凸などの空間特徴量を提供することや、車両や道路インフラから得られたセンサ情報に対して、交通ルール上の意味付け(どのレーン上の事象なのか、そのレーンと自分のいるレーンとはどういう関係なのか等)を提供することなど、新たな役割が道路地図に期待されるようになっています。そのようなニーズに応えるための高精度道路地図の作成に向けて、国内外の様々な組織で仕様検討や試作が行われています。
高精度の道路地図上に、センサなどから得た交通データ(動的情報,準動的情報,準静的情報)を重ねて、位置参照方式を用いてお互いに紐づけられるようにしたデータ集合は「ダイナミックマップ」と呼ばれています。ヨーロッパで提案された当初は、車両周辺の情報を扱うローカルダイナミックマップとして検討されてきましたが、現在は広域を扱うように概念が拡張されており、ダイナミックマップは、自動走行システム等の高度な交通サービスを支えるために必要な情報基盤と位置づけられています。日本国内では内閣府の戦略的イノベーション創造プログラム・自動走行システム(SIP-adus)のプロジェクト内で重点分野の1つとして取り組まれています。欧州でも、NDS協会において高精度道路地図の仕様が検討されており、ERTICO - ITS Europeにおいて車両からのデータをクラウドに集約する仕組みが検討されるなどの動きを見せています。
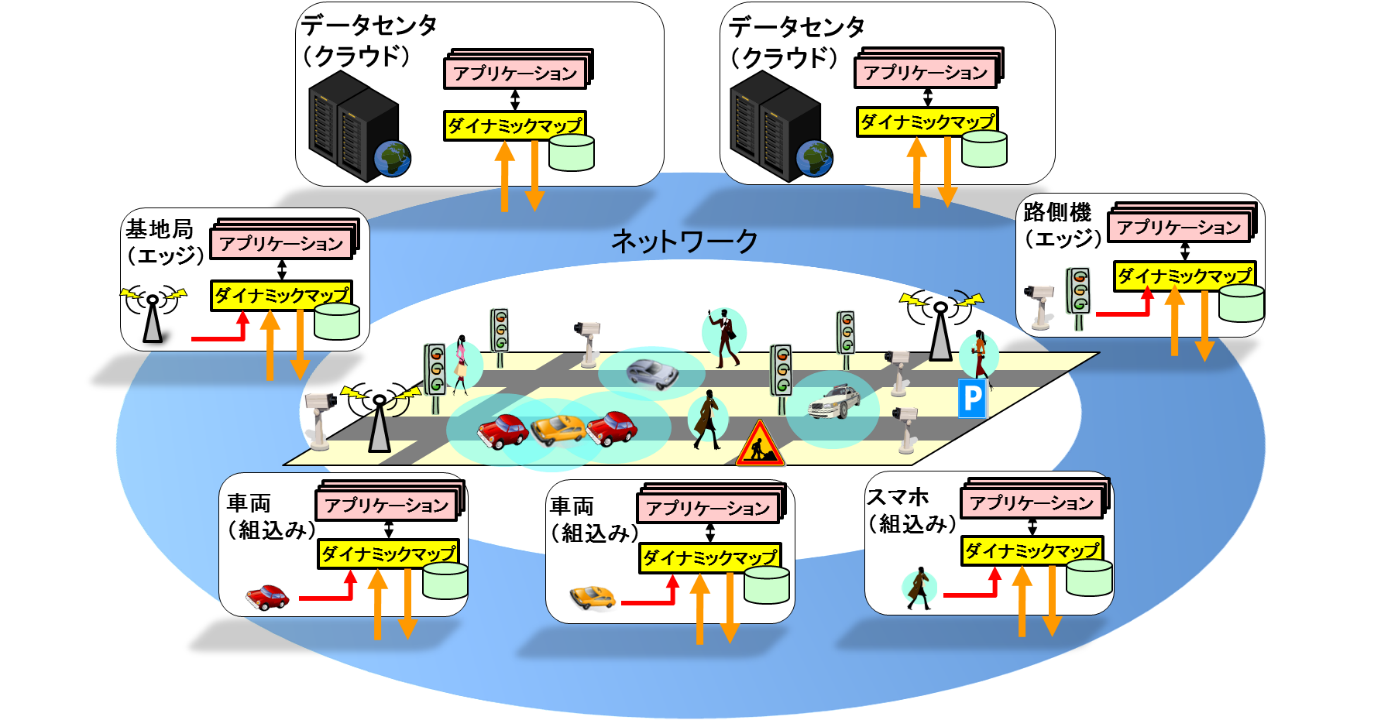
名古屋大学の高田広章教授らの研究グループでは、交通社会ダイナミックマップと呼ばれる、ダイナミックマップのプロトタイプシステムをこれまで開発してきました。高精度道路地図とセンサ情報に対する、収集、統合、検索など、データ管理のために必要となる機能を提供するシステムであり、交通サービスを提供するアプリケーションプログラムの開発がより柔軟かつ容易に行えるものです。しかし、都市の広大な領域から上がってくる大規模なデータに対して、クラウドにデータ管理機能を一極集中させたシステム構成では、処理負荷の集中や通信遅延などが大きな問題となります。決められた制限時間内に必要な情報を返答できる、十分な応答性能を確保することが難しくなります。解決のためには一極集中の構成をやめ、車載システムやスマートフォン等の組込み環境との連携、道路インフラ・通信基地局などのエッジ環境との連携、クラウド環境の複数サーバでの並列動作といった、幅広い実行環境での連携を想定したデータ処理と通信の仕組みを採用することが必要です。そのような先進的な仕組みを実現することは世界的にも新しい試みであり、単一の大学や企業の枠では研究開発が難しいことから、複数の組織から共同研究参加者を募り、コンソーシアム型の共同研究組織「ダイナミックマップ2.0コンソーシアム」(DM2.0コンソ)を立ち上げるに至りました。
DM2.0コンソでは、クラウド、エッジ、組込みをカバーする、ダイナミックマップのソフトウェアプラットフォームに関する研究開発を行っています。具体的には、①クラウド、エッジ、組込みの環境を連携させる分散データ処理機構を備えたデータストリーム管理システム(DSMS)の設計と実装、②ダイナミックマップにおける、静的、準静的、準動的、動的情報のデータ定義の検討、③ダイナミックマップで用いられる通信方式の検討と評価、④ダイナミックマップの利便性を訴求するユースケースの検討と具体的な交通アプリケーションの試作、⑤ダイナミックマップの実験評価を行っています。
2017年8月時点のDM2.0コンソの構成員として、大学から名古屋大学と同志社大学、企業から、アイシン・エィ・ダブリュ株式会社、株式会社NTTデータMSE、住友電気工業株式会社、パイオニア株式会社、パナソニック株式会社、富士通株式会社、ヤマハ発動機株式会社が参加しています。また、協力会社としてインクリメント・ピー株式会社、オブザーバとして京都高度技術研究所が参加している他、複数の大学の研究者が参加しています。
DM2.0コンソでは、広く交通分野全体からダイナミックマップに関するご意見・ご要望をいただけるようにしたいと考え、研究成果の一部を公開しています。現在公開されている①高精度道路地図仕様と②クエリ言語仕様は、どちらもダイナミックマップにとって重要な要素です。
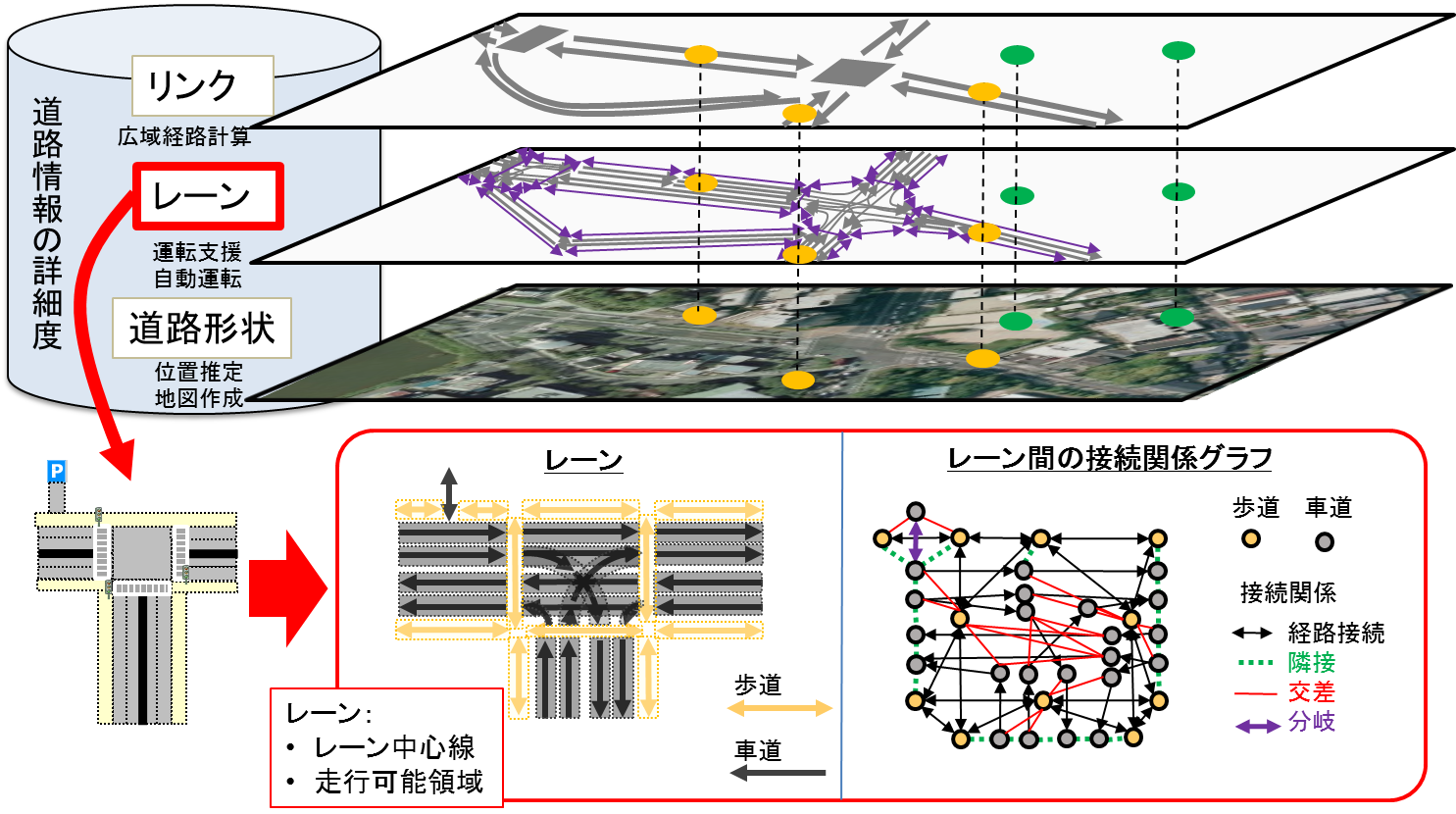
①高精度道路地図仕様は、従来のナビゲーション用の地図よりも細かい、レーン単位の粒度で地物として扱うための表現方法について定義しています。1つのレーンは、走行時目安線(または中心線)と走行可能領域のペアで表現されています。走行時目安線は自動走行システムが走行軌跡を生成する際に、また、走行可能領域はセンサ情報がどのレーン上での事象であるのかを対応付けする際に、特に有効な情報となっています。さらに、レーン同士がつながっているのか、一部交差しているのか、隣接しているのかといった、レーン間の関係を明示的にデータとして表現しています。これにより、「今いる車線と交差する関係にある別の車線を教えてほしい」などのレーン同士の関係を問い合わせる検索を行うことができるようになりました。
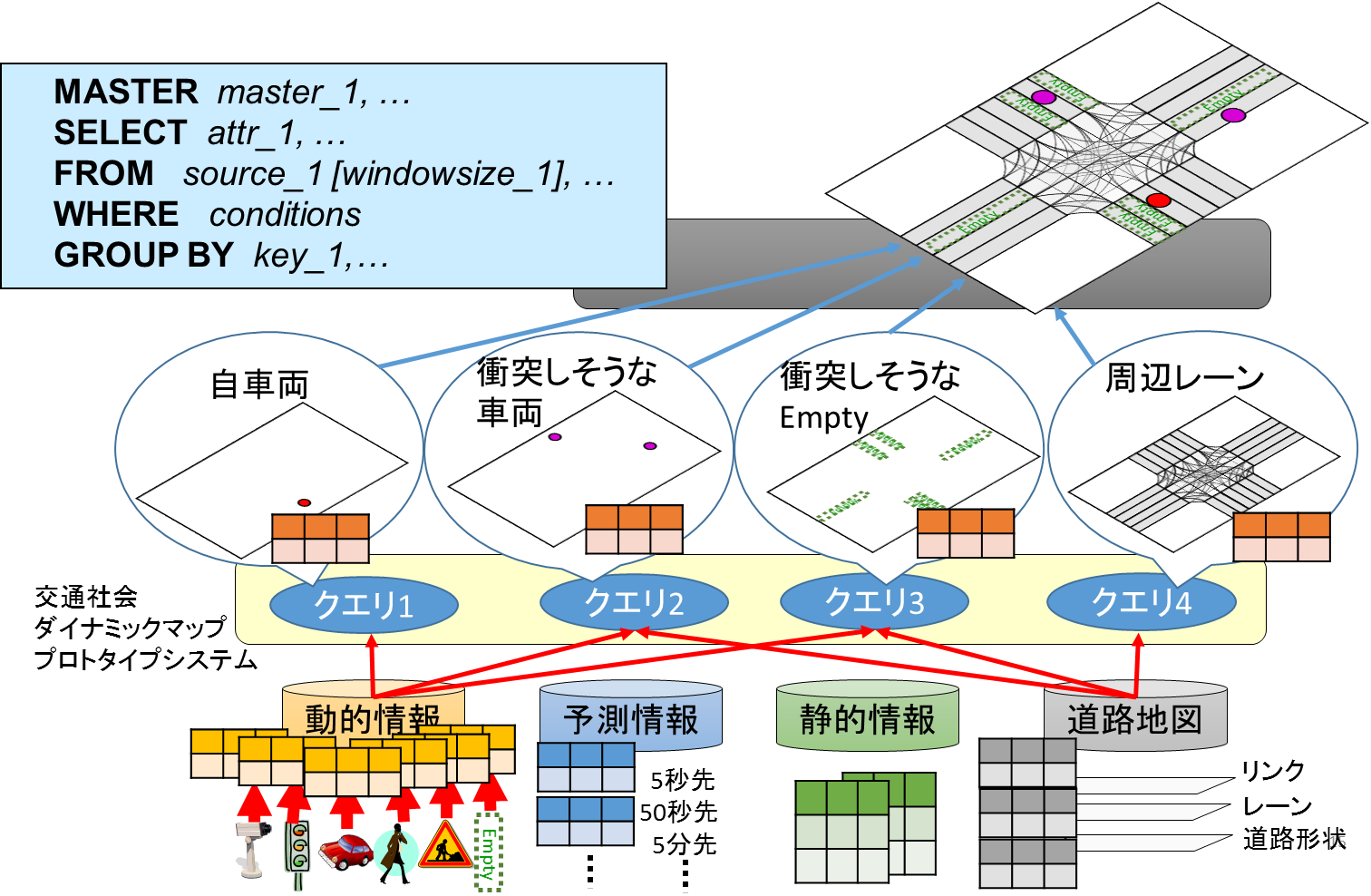
②クエリ言語仕様は、道路地図情報やセンサ情報などの交通データ間の関連付けやフィルタリングなど、データ検索の基本操作を呼び出すためのクエリ言語を定義しています。従来までのデータアクセス手段は、道路地図には道路地図専用のアクセス手段を用い、センサ情報にはまた別の専用アクセス手段を用いていました。しかし、情報の種類ごとにアクセス手段が違っていては、道路地図やセンサ情報に跨った横断的な検索を行うことが難しく、データの活用の幅が狭まってしまいます。そこで、各種情報を共通のデータ構造に格納した上で、共通のデータ操作体系で扱えるようにしました。リレーショナルデータベースシステムの理論を背景に、国際標準のクエリ言語であるSQLを拡張したものを提案しています。
これら中核部分の仕様公開により、自動車OEMや交通関連組織からのフィードバックを得て、交通分野全体からより支持の得られる基盤づくりを目指します。
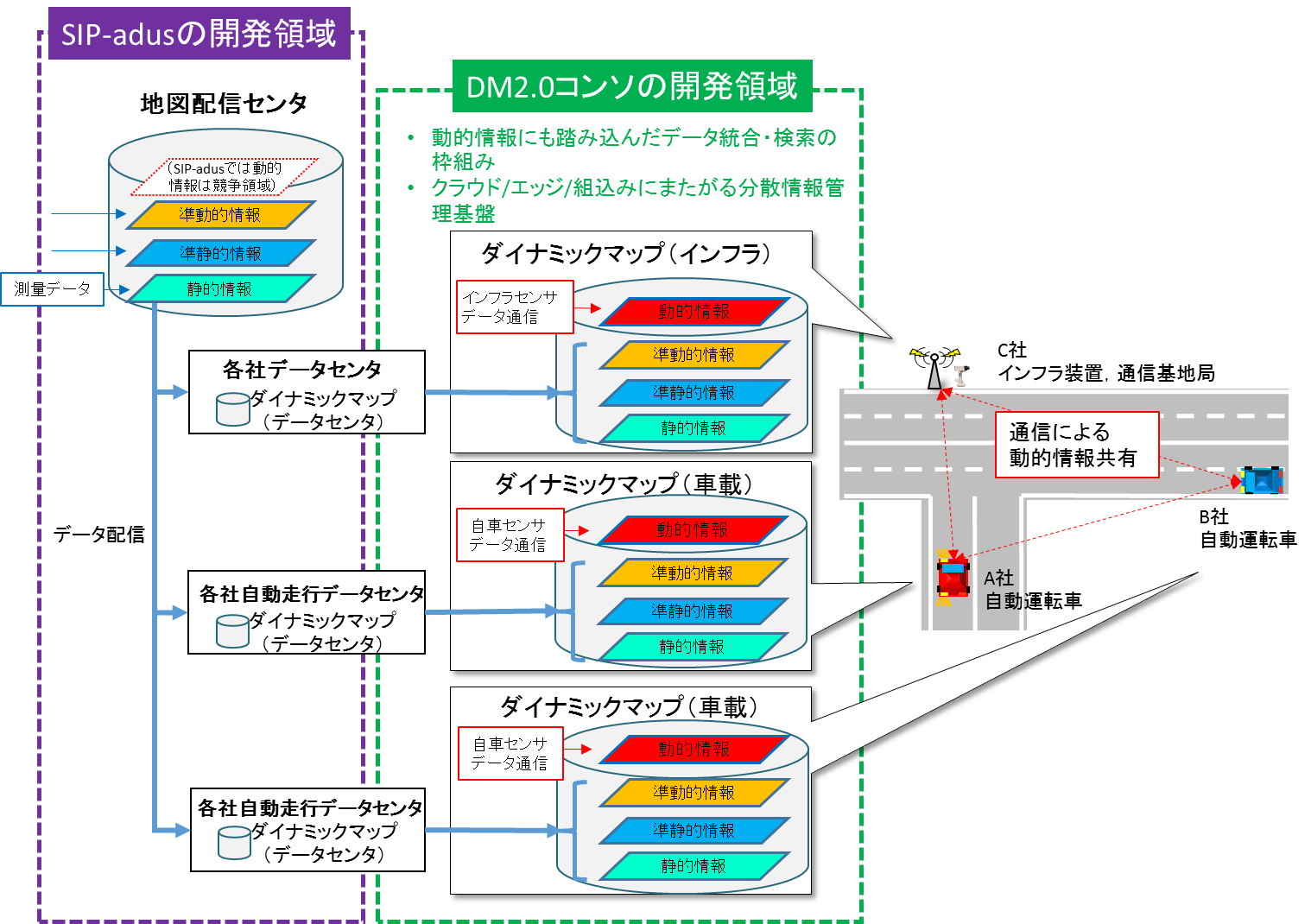
ダイナミックマップの研究開発はSIP-adusでも行われていますが、DM2.0コンソの開発領域とは異なっています。
SIP-adusで検討中のダイナミックマップが扱う、静的情報にあたる道路地図仕様では、測量データからの書き起こしと、地図配信センタから各自動車OEMのデータセンタへのデータ配信に主眼が置かれています。地図データを自動車OEMのデータセンタに提供した先では、なんらかの方法で地図情報と動的情報を統合する必要がありますが、SIP-adusのダイナミックマップでは動的情報の扱いが競争領域に設定されており、道路地図と動的情報の統合は仕様化・共通化の範囲に含まれておりません。そのため、SIP-adusの道路地図仕様は、動的情報と統合利用することを主目的とせずに設計されているといえます。
一方、DM2.0コンソが目指すダイナミックマップは、動的情報の扱いにまで踏み込んでおり、車載システムや路側機、通信基地局などで、地図情報と動的情報を横断的に検索・統合するための枠組みを検討しています。静的情報と動的情報が共通のデータ構造(テーブル)で表現されていたり、共通のクエリ言語が定義されていたりするのは、統合と検索のためです。DM2.0コンソの道路地図仕様やクエリ言語は、データ統合と検索に主眼をおいているといえます。
DM2.0コンソの開発領域は、SIP-adus開発領域の次のステップに向けたダイナミックマップ先行研究として位置づけられます。両者の開発領域は競合するものではなく、共存可能です。(例えば、データ配信時にはSIP-adusの道路地図仕様のデータを使い、動的情報を含めた統合・検索時にはDM2.0コンソの道路地図仕様のデータへ変換し、クエリ言語を用いて検索する、など)
参加大学
国立大学法人東海国立大学機構 名古屋大学
高田 広章 教授 (名古屋大学 未来社会創造機構)
森川 高行 教授 (名古屋大学 未来社会創造機構)
石川 佳治 教授 (名古屋大学大学院 情報学研究科)
村瀬 勉 教授 (名古屋大学 情報基盤センター)
河口 信夫 教授 (名古屋大学 未来社会創造機構)
中本 幸一 特任教授 (名古屋大学大学院 情報学研究科)
二宮 芳樹 特任教授 (名古屋大学 未来社会創造機構)
手嶋 茂晴 特任教授 (名古屋大学 未来社会創造機構)
山本 雅基 特任教授 (名古屋大学大学院 情報学研究科)
渡辺 陽介 特任准教授 (名古屋大学 未来社会創造機構)
金森 亮 特任准教授 (名古屋大学 未来社会創造機構)
赤木 康宏 特任准教授 (名古屋大学 未来社会創造機構)
田代 むつみ 特任講師 (名古屋大学 未来社会創造機構)
大野 沙知子 特任助教 (名古屋大学 未来社会創造機構)
西尾 信彦 招へい教員 (名古屋大学 未来社会創造機構、立命館大学 情報理工学部情報理工学科 教授)
石原 進 招へい教員 (名古屋大学 未来社会創造機構、静岡大学 学術院工学領域 工学部数理システム工学科 教授)
中條 覚 招へい教員 (名古屋大学 未来社会創造機構、株式会社三菱総合研究所)
学校法人同志社 同志社大学
佐藤 健哉 教授 (同志社大学 モビリティ研究センター、名古屋大学 未来社会創造機構)
参加企業
株式会社NTTデータMSE
パナソニック株式会社
富士通株式会社
ヤマハ発動機株式会社
オブザーバ
公益財団法人京都高度技術研究所
連絡先
ダイナミックマップ2.0コンソーシアム事務局 E-Mail:dm2-sec:::nces.i.nagoya-u.ac.jp(:::
を @ に変えてください)
